FIND研究員:吳��鴻 
光達感測技術應用日益普及
光達 (Lidar) 感測具有高精度、高準度及高辨識度的優點,因此在機器人及無人自駕車領域,已被廣泛大量使用。在機器人領域,藉由光達輔助,可協助自主移動機器人(Autonomous Mobile Robot,AMR)完成環境建圖(Mapping)、定位(Localization)、導航 (Navigation)、物件偵測 (Object Detection)、避障 (Obstacle Avoidance) 等功能,這些功能也是光達在機器人的主要應用。
光達可分為機械式 (mechanical)及固態式 (solid state) 二種,傳統光達為機械式,使用機械結構旋轉掃描,其具有造價高、體積大、速度慢等缺點。新一代固態光達 (Solid State Lidar) 使用全電子式器件完成光束轉向(steering)及掃描(sweeping),具備體積小、速度快、準度高等優點。以光學相控陣 ( Optical Phased Array,OPA) 技術為基礎所設計之固態光達,是光達技術發展的新趨勢,本文將對 OPA-based 固態光達技術原理做一簡單介紹。
OPA LiDAR是目前固態光達的設計主流
光探測和測距(Light Detection And Ranging, LiDAR)是一種使用雷射光(emitted laser light)來探測環境的一種技術,是依據光波在介質中傳播遇到物體反射所需時間,即所謂飛行時間(Time of Flight, ToF),推算距離的方法。光訊號的發射可透過雷射二極體(laser diode)元件來完成,而光的偵測及接收可透過光電二極體(photo diode)。
傳統光達掃描方式,多使用機械結構或微機電系統(MEMS)完成,因為是平面機械式旋轉,出現在平面以上高度位置或以下位置的物體幾乎無法偵到,因此機器人往往需在不同角度安裝多個光達,否則會出現偵測盲點。但若使用的是固態光達,則三維空間掃描變得快速且容易,即使路徑上方有突然凸起障礙物也能避開,並可支援懸崖預警探測,感知裝卸貨平台邊緣以避免跌落邊緣。
固態光達不需使用任何機械式零組件,雷射光束方向的改變(steering)靠電子控制完成,因為沒有機械結構,所以不會有移動組件(moving parts)在受到撞擊或振動時錯位或磨損的問題。OPA LiDAR是目前固態光達的設計主流,也是未來光達設計主要方向。
OPA LiDAR的原理是透過大量相控光學天線單元(phase-controlled optical antenna elements)所發射光波之間的互相干涉 (interference),來達成光束(Light beam)轉向(steering)功能,參考圖一。
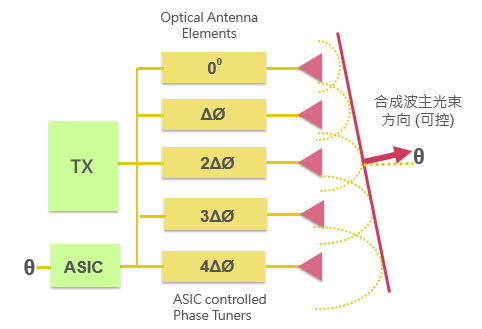
圖1:光學相控陣列技術原理
資料來源:本研究自繪
「干涉轉向」是OPA LiDAR運作的主要原理,給與發射陣列中每個單元不同的發射相位,再利用不同相位的光在干涉時,有的方向會互相增強,有的方向會互相抵銷,合成波的射出方向即可改變,若經過計算,就能任意改變及控制合成波的發射角度,實現多維度空間掃描功能。
低成本、遠距探測成為最大挑戰
光波掃描的同時,會再透過光電二極體接收並處理掃描後的反射光束(reflected),量測光束來回的飛行時間(time of flight),接著計算每一個環境反射點的深度,據此建立出點雲圖(point cloud),最終完成機器人三維建圖(3D-mapping)、導航及避障等應用功能。
2022年5月,OPA LIDAR領導廠商Quanergy,宣布了其100% CMOS based OPA LiDAR,已成功實現業界領先的250米的距離探測[1],當然這樣的距離離市場需求還有加強空間,但其低成本及高可靠性的優勢,使其未來發展仍被相當看好。如何將生產成本再降低,提供更遠距離的空間探測範圍,將是OPA LiDAR的最大挑戰。
參考文獻
[1]Quanergy Systems, Inc., (2022/May/10), Quanergy Delivers Industry-First 250 Meter Range for OPA-Based Solid State LiDAR。https://quanergy.com/pressrel/quanergy-delivers-industry-first-250-meter-range-for-opa-based-solid-state-lidar/-



沒有留言:
張貼留言